
Projekt „Laser engraver”
 Podczas budowy urządzenia postawiono duży nacisk na jego jakość wykonania.
Podczas budowy urządzenia postawiono duży nacisk na jego jakość wykonania.

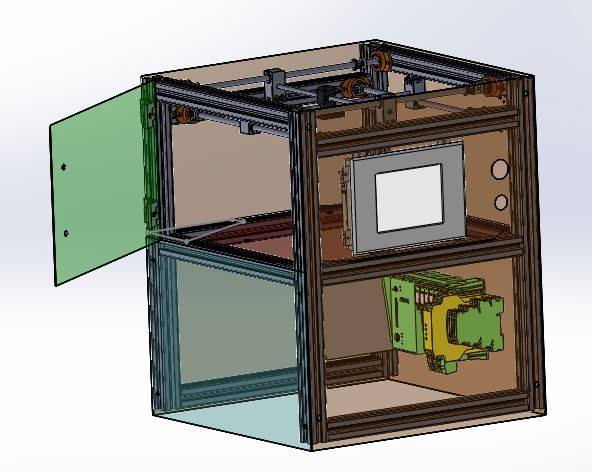
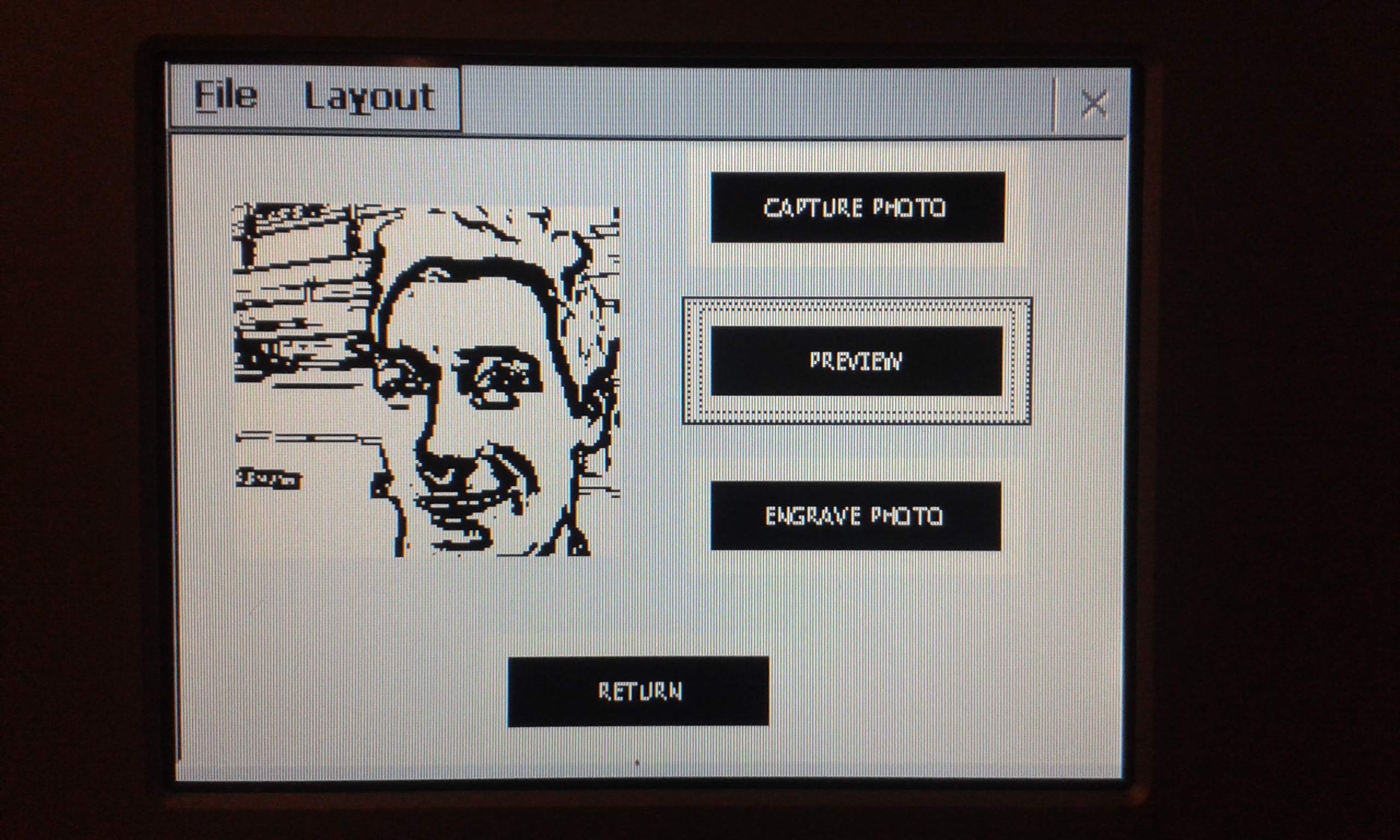
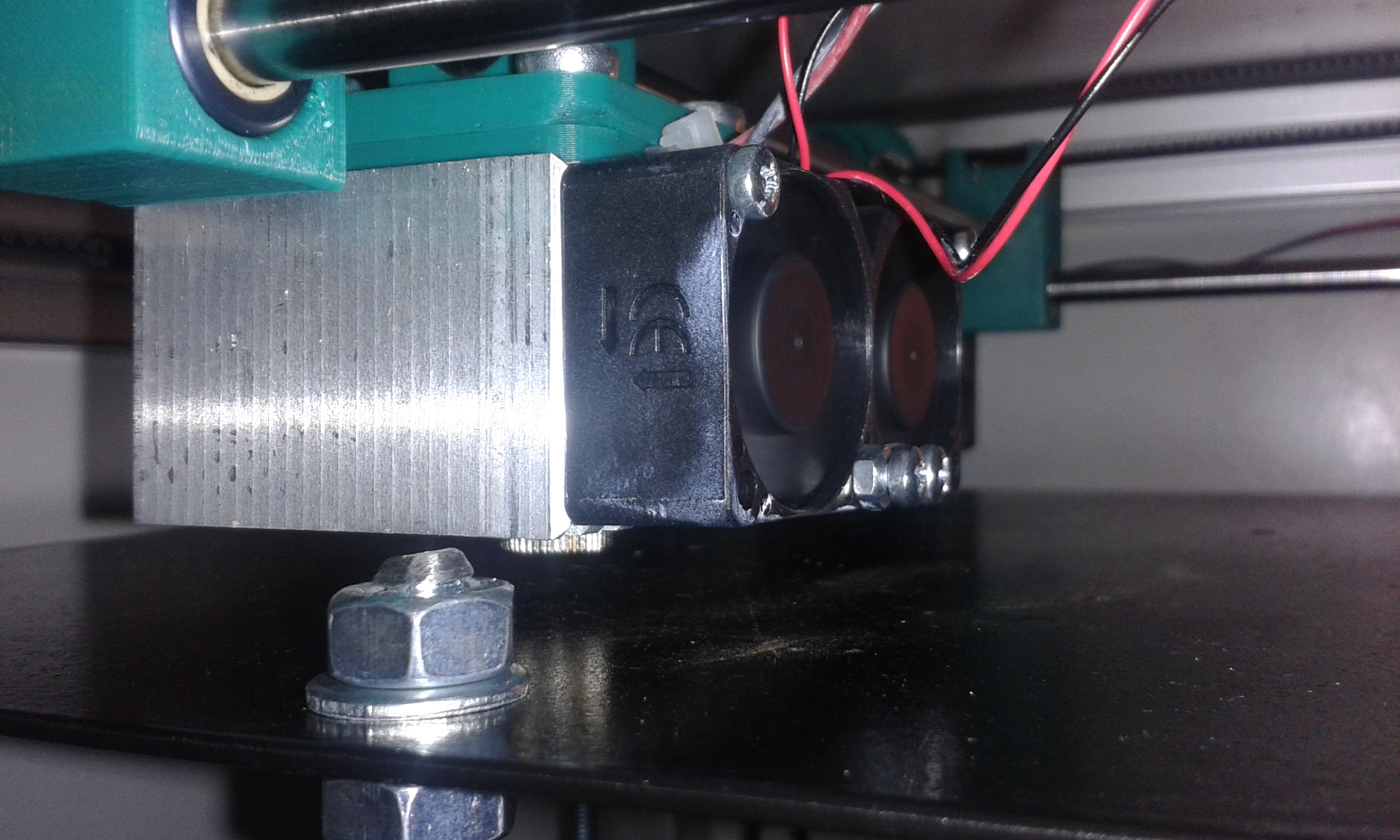

Celem projektu było zaprojektowanie grawerki laserowej zintegrowanej z kamerą, która umożliwia grawerowanie wykonanych zdjęć w tworzywach sztucznych oraz drewnie. Urządzenie składa się z głowicy laserowej z diodą o mocy 2W oraz długości światła 445nm (niebieski kolor), układu kinematycznego pozwalającego na sterowanie głowicą w płaszczyźnie XY, sterownika PLC oraz modułów rozszerzających, panelu HMI, kamery oraz odpowiednich systemów bezpieczeństwa. Całość osadzona jest na ramie z profili aluminiowych i zamknięta w obudowie z blach.
Projekt zakwalifikował się do drugiego etapu międzynarodowego konkursu Xplore New Automation Award 2015.
Elementy niezbędne do sterowania (sterowniki PLC, moduły PWM, moduły bezpieczeństwa itp.) zostały zakupione w sklepie Phoenix Contact ze środków przeznaczonych przez tę firmę na projekt. Obudowę z blach wykonała firma Hak Sp. z o. o., która była sponsorem projektu w konkursie. Część elementów układu kinematycznego oraz mocowań została wykonana w procesie drukowania 3D we współpracy z Kołem Naukowym Rapid Troopers.
Projekt został zakończony. Grawerka działa zgodnie z początkowymi założeniami. W tym momencie rozwijane są algorytmy obróbki obrazu użyte w maszynie oraz prowadzone są prace nad rozszerzeniem obszaru roboczego grawerki.
Osoby zaangażowane w realizację projektu: Mateusz Lebiedzki, Szymon Szczutkowski, Łukasz Kulpiński, Piotr Gruber, Piotr Koruba, Piotr Komarnicki.
Projekt pozwolił na nabycie praktycznych umiejętności przy konstruowaniu maszyn, programowaniu sterowników PLC oraz rozwinął umiejętności pracy w grupie.
Informacje w mediach, jakie pojawiły się o projekcie:
https://www.facebook.com/laserengravernewautomationaward
Projekt DeskCleaner
Celem projektu było skonstruowanie robota, który w zaplanowany sposób będzie porządkował biurko lub inną powierzchnię roboczą. Urządzenie składa się z manipulatora, kamery, sterownika PLC oraz panelu HMI. Program polega na odczytaniu współrzędnych środków przedmiotów na podstawie zdjęcia zrobionego przez kamerę. Dziki temu robot jest w stanie zlokalizować przedmiot i przenieść go w wyznaczone miejsce.
Projekt zakwalifikował się do drugiego etapu międzynarodowego konkursu Xplore New Automation Award 2015.
Osoby zaangażowane w realizację projektu: Debora Szymańska, Jan Unold, Piotr Przybyś, Karol Puławski.
Problemy napotkane przy realizacji projektu to zbyt mała rozdzielczość serwonapędów, wybranych do manipulatora, co skutkuje jego małą dokładnością oraz ograniczenia programowe uniemożliwiające implementacje programu przetwarzania obrazu oraz sterowania robotem w jednym programie (PC Worx).
Projekt pozwolił na zdobycie doświadczenia w zakresie programowania sterowników PLC oraz konstruowania manipulatorów szeregowych.
Informacje w mediach, jakie pojawiły się o projekcie: